
This page introduces the autonomous vehicles that I have been involved in designing, building, or debugging.
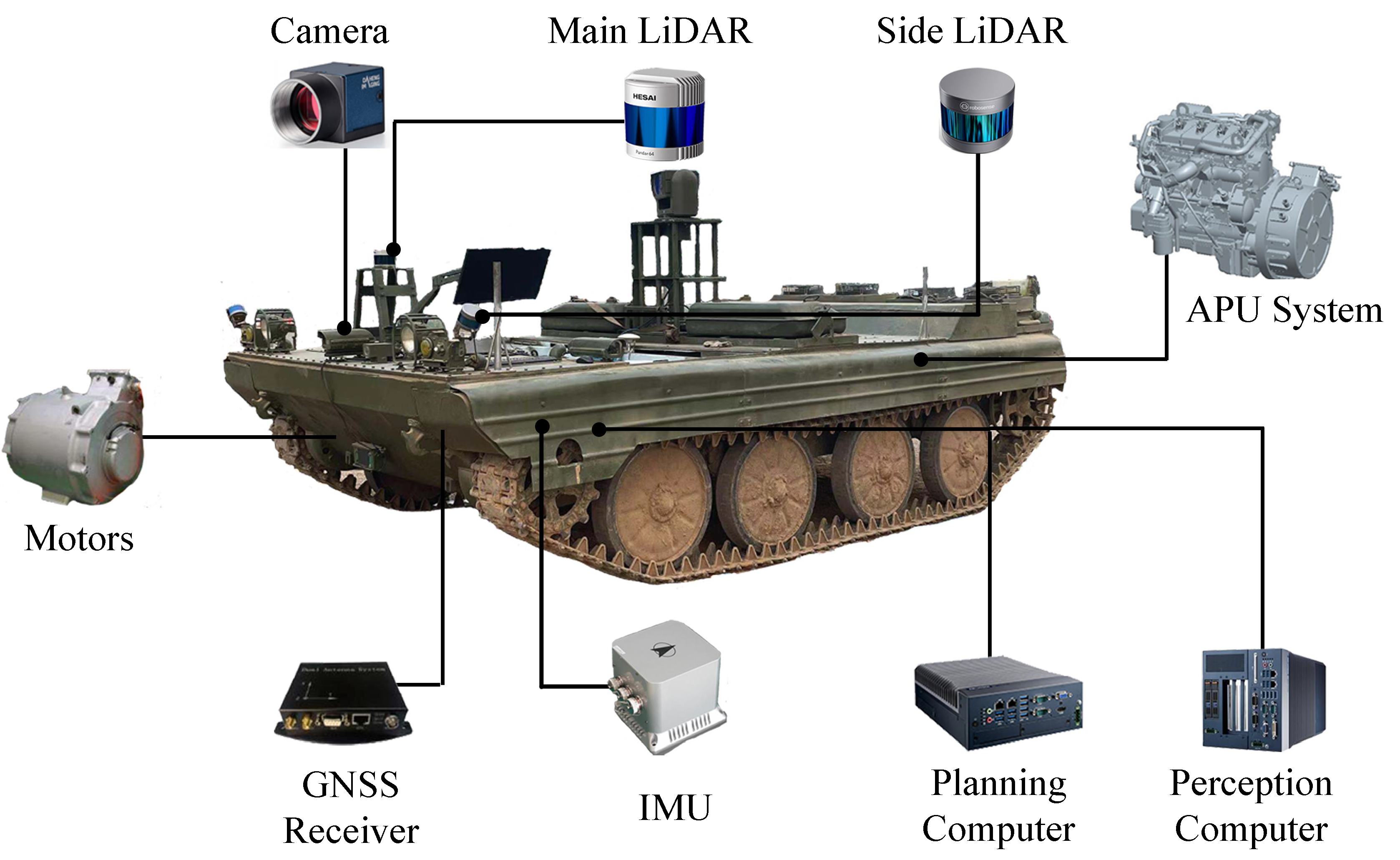
The Heavy Tracked Unmanned Ground Vehicle (HTUGV)
HTUGV is a dual-sided independently driven series-parallel hybrid tracked platform. It has the capability for autonomous driving and remote control in unstructured environments.
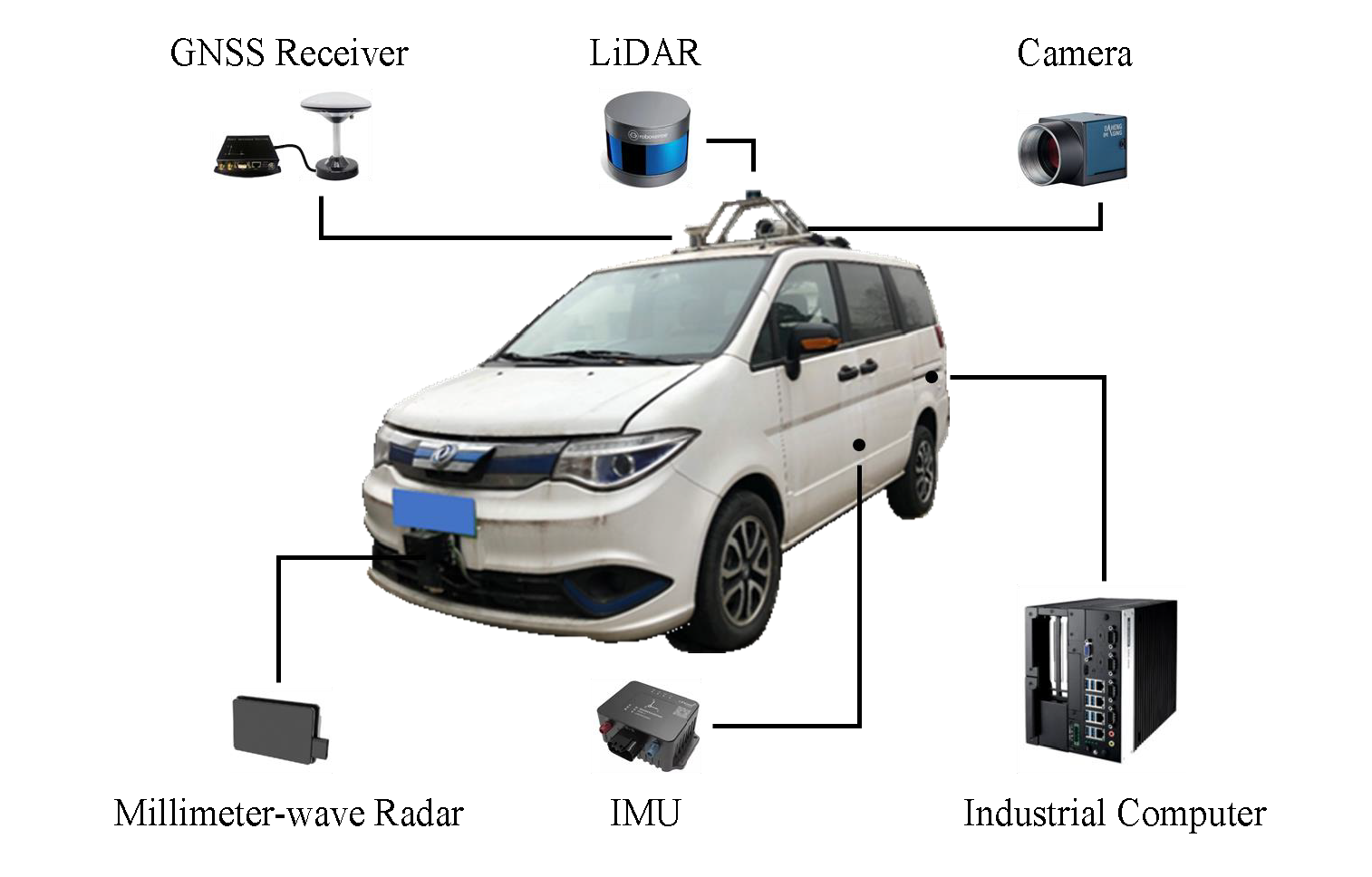
The Pure Electric Autonomous Wheeled Vehicle (ADF)
ADF is an autonomous vehicle modified based on a commercially available electric vehicle. It is capable of autonomous navigation in both structured and unstructured scenarios.
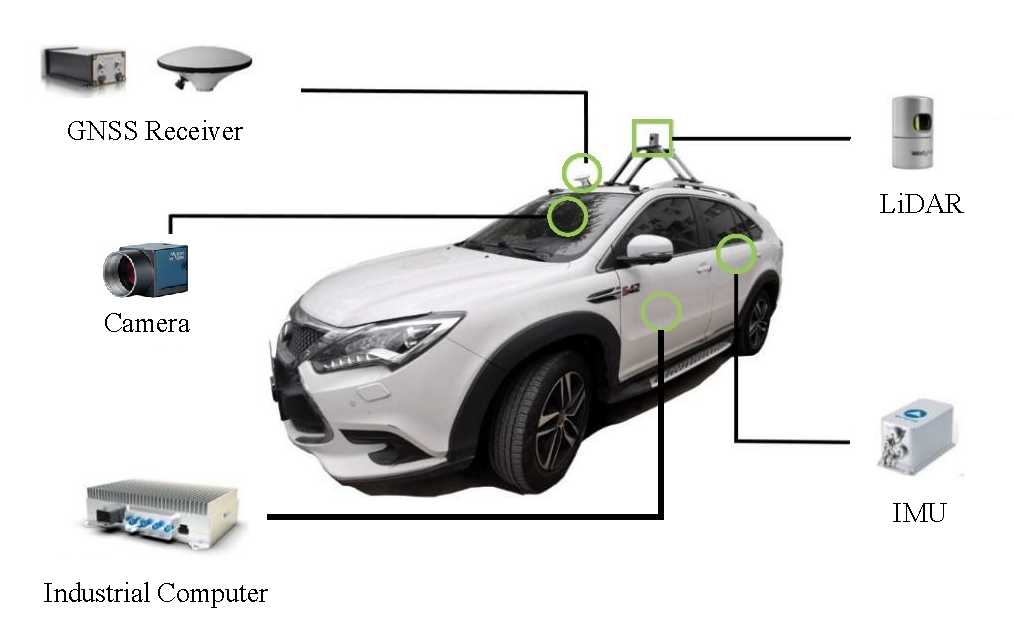
The Hybrid Power Data Collection SUV (TANG)
TANG is a data collection vehicle modified based on a commercially available SUV. It is capable of performing data collection tasks in both structured and unstructured scenarios.
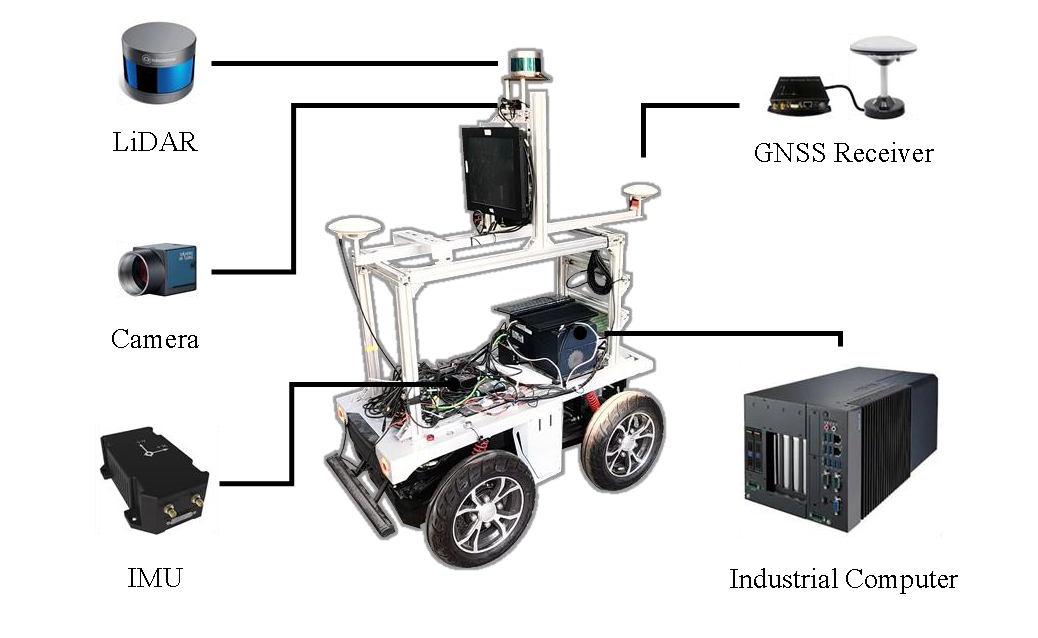
The Mini Ackermann-steered Autonomous Vehicle (MWV)
MWV is a mini pure electric Ackermann-steered rear-wheel-drive autonomous wheeled vehicle. It is utilized for performance testing of autonomous algorithms.